Conectar un GPS con Frambuesa Pi
atención : Este artículo ha sido traducido automáticamente por Bing Traducir
Advertencia : Este artículo ha sido traducido automáticamente por Bing Translate
Hoy ca no es realmente un tutorial pero más consejos para conectar un módulo GPS a tu Raspberry Pi. De hecho, la configuración es extremadamente sencillo gracias al módulo gpsd.

Siempre para mi proyecto de frambuesa móvil, Necesito saber la posición regularmente. ¿Qué es mejor que un GPS.
Agregar que GPS a la frambuesa puede hacerse de tres maneras (o si tienes alguna otra idea más !) :
- Lograr un GPS regulador incluso se basa en diferentes componentes. Ventaja : costo reducido, Creo que menos de 20 €. Sólo es necesario, Eso creo, Si tampoco sabe o tenían miedo de entrar en.
- Algunos como Adafruit, Ofertas listo para usar mapas (como aquí). Era muy tentador como enchufarlo en el GPIO y controla todo. Para mí el precio era un freno : mapa, una antena, un adaptador de antena (Hay abuso un poco para vender !) y posiblemente un conector para puerto USB.
La factura asciende por lo tanto a 57$ excluyendo gastos de envío. - El módulo GPS llave en mano. Buscando un poco encontré que la BU-353 puede conectar a la frambuesa. Todo esto para menos de 40$ incluyendo gastos de envío ! Suficiente tratando así.
Iniciando con ello el principio de que me puede ser no montar mi GPS bricolaje, Hice un paseo en un sitio chino reventa y rápidamente se colocó la orden. El modelo es un módulo externo BU-353 se conecta por USB, con un hermoso imán debajo de fix o una ventosa que se conecta al cable. 37,80$ incluyendo los gastos de envío. Recepción 10 días más tarde :

Izquierda a reconocer por Raspberry Pi. ¿Y por qué nada más sencillo :
- Actualización del sistema
apt - actualización && apt - get upgrade y
- Instalar las herramientas de gestión GPS : GPSD
apt - get install –y gpsd gpsd-clientes python-gps
Se trata de, Eso es todo ! Tienes incluso lo que se necesita para llegar con un script en Python.
Para comprobar que tiene el comando cgps :
CGPs s

Y para leer los datos en Python, Aquí está un ejemplo que se encuentra en el sitio de Dan Mandle :
#! /usr/bin/python
# Escrito por Dan Mandle http://Dan.Mandle.me septiembre 2012
# Licencia: GPL 2.0
os de importación de importación gps *
de momento la importación *
importación import tiempo enhebrado gpsd = None #seting el os.system variable global('borrar') #claro la terminal (opcional)
clase GpsPoller(enhebrado.Hilo de rosca):
def __init__(auto):
enhebrado.Thread.__init__(auto)
global gpsd #bring en ámbito gpsd = gps(modo = WATCH_ENABLE) #a partir de la corriente de información self.current_value = no self.running = True #setting el hilo al verdadero def run(auto):
global gpsd mientras gpsp.running:
GPSD.Next() #Esto continuará a lazo y agarrar cada conjunto de gpsd info para borrar la memoria intermedia si __name__ == '__main__':
gpSP = GpsPoller() # crear el intento del hilo de rosca:
gpSP.Start() # Arranca while (True):
#Puede tomar uno o dos segundos para conseguir buenos datos #print gpsd.fix.latitude,', ',GPSD.Fix.Longitude,' Tiempo: ',GPSD.UTC os.system('borrar')
impresión impresión 'lectura GPS'' '---' imprimir 'latitud' , GPSD.Fix.Latitude impresión '' de longitud , GPSD.Fix.Longitude imprimir 'hora utc' , GPSD.UTC,' + ', GPSD.Fix.Time impresión ' altitud (m)' , GPSD.Fix.Altitude impresión 'eps' , GPSD.Fix.EPS impresión 'epx' , GPSD.Fix.EPX impresión 'epv' , GPSD.Fix.EPV impresión 'ept' , GPSD.Fix.EPT impresión ' velocidad (m/s) ' , GPSD.Fix.Speed imprimir 'subir' , GPSD.Fix.Climb imprimir 'track' , GPSD.Fix.Track impresión 'modo' , GPSD.Fix.Mode impresión impresión 'saturación' , GPSD.Satellites time.sleep(5) #establecer cualquier cosa excepto (KeyboardInterrupt, SystemExit): #Cuando usted Presione ctrl c impresión "\nKilling del hilo de rosca..."
gpSP.Running = False gpsp.join() # esperar a que el hilo terminar lo que es hacer imprimir "Hecho. nExiting."En caso de problemas para leer la información del GPS, el problema puede venir de los derechos sobre el archivo utilizado en/dev (a menudo/dev/ttyUSB0). Para remediar, Se debe modificar el archivo /lib/udev/GPSD.hotplug mediante la adición de la línea
chmod un rw $DEVNAME
antes de la línea
gpsdctl $ACTION $DEVNAME
(fuente del truco : aquí)
Aquí está tu móvil frambuesa, autónoma (Gracias a la fuente de alimentación con 6 baterías explican en Este artículo) conectado con el GPS :
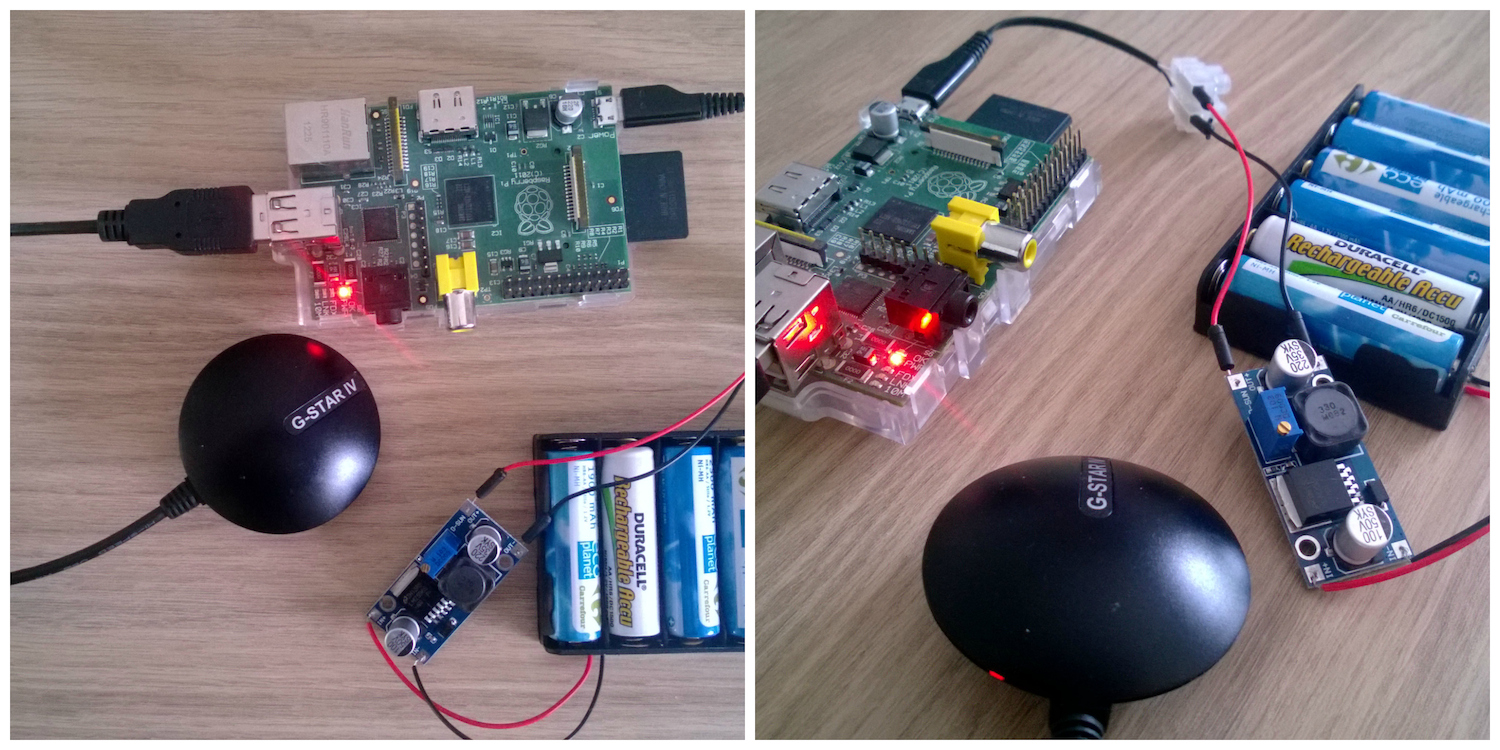
Te darás cuenta de la pequeña luz roja en el GPS que indica buena comida. Permanece fijo hasta que la señal se une. Cuando la posición puede ser recibida, la luz empieza a Flash.
En espérant vous avoir un peu aidé pour vos projets 🙂







Pingback: Setup USB GPS - Headstation()